Hello everyone!
In the previous post, plc247.com showed you how to use the Allen Bradley MicroLogix 1400 PLC to control Stepping Motor and Servo Motor. Today I will continue to guide you to use MicroLogix 1400 to control MR J4 Servo Motor
In Project plc247.com use PLC MicroLogix 1400 Model 1766-L32BXB (or 1766-L32BXBA is ok) and Servo Driver Mitsubishi MR-J4-A (Analog/Pulse Train)
MicroLogix 1400 & Mitsubishi MR J4 “Wiring Diagram”
- R= 2K2(Ω): Reduce voltage from 24VDC to 5VDC
- DM542 Setting 1000PLS = 1 Revolution

+ OUT2: Pulse Pin
+ OUT3: Direction Pin
+ OUT4: Servo ON/OFF Control
Mitsubishi MR J4 A Servo Driver Configuration
Here are the main parameters of the Mitsubishi MR J4 A that we need to install (Using MR-Configuration 2 Software, download link at the bottom of the article)
+ PA1: Servo control mode selection > Set to “1000” to select the position control mode.
+ PA6/7: CMX/CDV: Input pulse gain ratio. Used to correct the change of the number of pulses / revolutions when issuing a command from the PLC to the Servo. The default is 1/1, which corresponds to 131072 pulses / revolution
+ PA13.PLSS: Selection of control pulse types: Default is 0100, change the following two factors to select pulse input type. Please see the table below to choose the appropriate control method:

You can Copy the same parameters as Project as below

MicroLogix 1400 “Possition Control” Settings
+ Note: Default “OUT-Output” parameter setting “-1”, we need to change it to 2,3,4 (Corresponding Output 2,3,4) otherwise PLC will report an error!
+ In this project plc247.com uses OUT2 as a pulse generator >>> OUT – Output = “2”

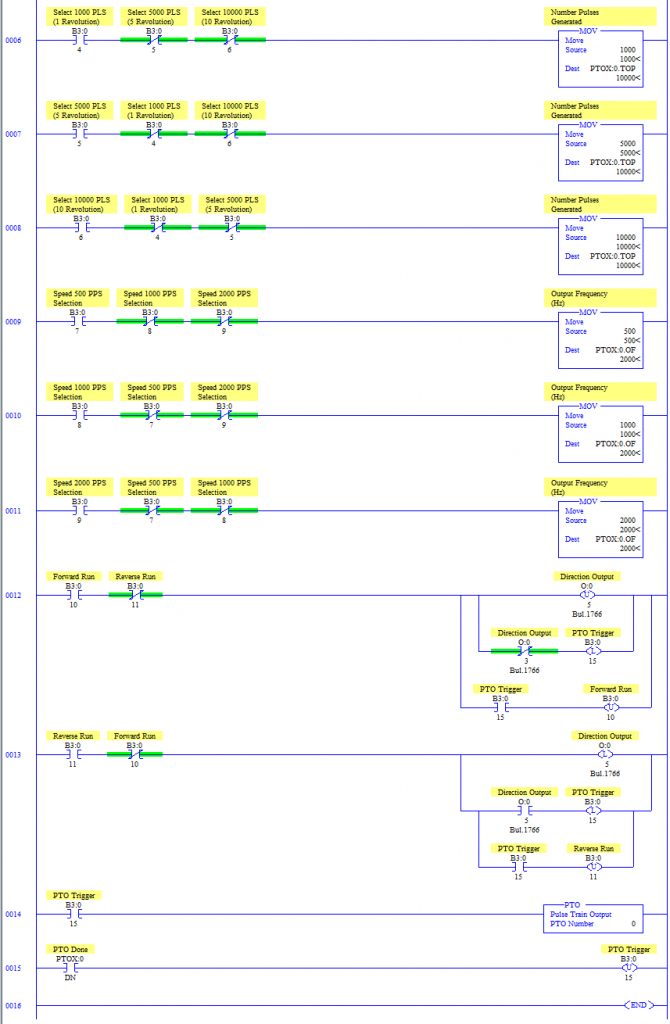
PLC Programming
+ Servo Jog & ON/OFF Control

+ Servo Position Control
Project Video Tutorial
======
Software to support parameter setting Servo
>>> Download MR Configurator 2 for Mitsubishi Servo Setting
Password Extract: plc247.com
If you have any questions in the process of using MicroLogix 1400 PLC to control Mitsubishi MR J4 Servo Motor, please comment below the article, plc247.com will answer you as soon as I read the comment.
Best Regards!






